关注协会

4 月15日,戴盟机器人联合海内外数十家学术机构与知名企业,发布全球最大规模含触觉全模态物理世界具身数据集Daimon-Infinity。数据规模计划于年内扩展至数百万小时,包含近十亿条具身数据;其中10000小时数据面向全行业开放共享,首批数据目前已于阿里魔搭社区上线开源。

当前具身智能难以落地、泛化能力不足,其核心瓶颈正在于缺乏来自真实世界,尤其是含有物理交互信息的数据。不同于视觉的远距离感知,触觉能直接提供接触力、接触形变、接触状态及物体纹理、材质等物理反馈,有效弥补视觉的盲区与错觉。在具身智能的“感知-行动”闭环中,触觉是连接被动观察与主动交互的关键——只有实现视觉与触觉的深度协同,机器人才能在复杂的物理环境中完成精准、稳定的操作。
作为率先提出VTLA(Vision-Tactile-Language-Action)架构的创新者,戴盟依托全球领先的视触觉技术,将高密度、全模态触觉信息引入具身智能的数据主干,为机器人精细操作提供了更真实、更丰富的训练基础,进一步驱动具身智能向高泛化性与高可靠性演进。
全模态信息
高质量触觉,补全稀缺的物理交互数据
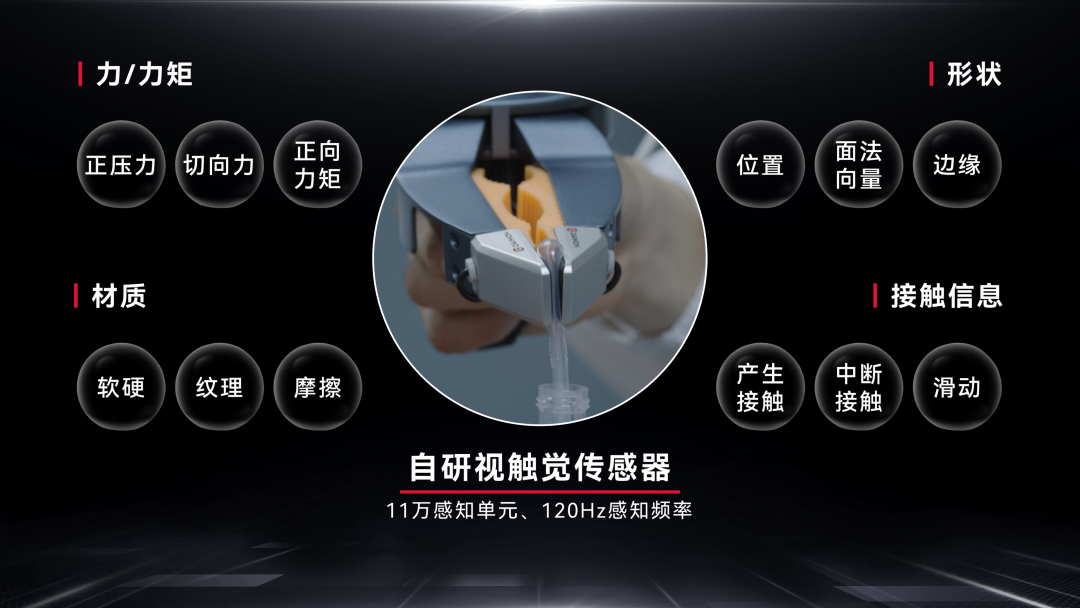
Daimon-Infinity数据集依托于戴盟自研的二指夹爪及五指手套数据采集设备,其搭载的含11万感知单元、120Hz高频率视触觉传感器,配合鱼眼相机、编码器、IMU、双目相机,为数据集提供触觉、视觉、动作轨迹、执行动作、语音文本等全维度信息。
值得一提的是,Daimon-Infinity提供了目前行业内最高质量的触觉数据,包含接触力、接触形变、滑移,及物体材质、形貌、纹理、软硬等高密度全模态触觉信息,为精细操作补全稀缺的物理交互特征。戴盟视触觉数据获业界广泛认可,得到OmniVTA、AnyTouch2、FG-CLTP等含触觉模型的验证。
数据处理链路
全流程质量管控,确保数据高效利用
戴盟搭建了全链路数据处理引擎,为Daimon-Infinity提供从物理交互到数字世界的全流程质量管控:通过软硬件协同,从前端采集源头实现毫秒级对齐;通过高效编码压缩及序列化压缩,保持数据精度的同时,最小化数据存储成本;数据可从采集设备直传云端,进入处理管线,从中恢复双手运动轨迹,轨迹重建精度达到行业领先水平,确保数据一致性与可用性。
基于戴盟在触觉感知领域的长期积累,数据处理管线可从采集的原始数据中提取出接触形貌、三维形变场、三维分布力,以及六维集中力等十多种模态,将真实世界的交互表征嵌入到每一帧数据中。处理后的数据,通过大模型自动化标注、人工标注及审核,将触觉、视觉、动作等信息融合,输出操作任务的多维度标注,形成了从含触觉的多模态感知到动作的全链路闭环。
依托于阿里云人工智能平台PAI、文件存储CPFS、对象存储OSS和无影提供的方案能力,戴盟实现了真机数据安全上传、模型高效训练仿真、数据可视化展示,解决具身智能从实验室走向产线的工程化难题,加速技术迭代与商业化落地。同时,在数据采集与模型训练方面,戴盟团队积累了规模化、定制化的量产经验——已累计处理并标注数万小时高质量多模态数据,并将核心流程、关键指标沉淀为平台标准能力,提升交付效率与结果一致性。

有效性验证
跨本体通用数据,训练效率跃升10倍
具身智能的快速迭代,高度依赖标准化的高质量数据供给。Daimon-Infinity采用高度标准化的数据格式规范,支持主流模型需求;采集末端不依赖本体构型,可适配各种机器人,实现跨机器人本体的数据应用。
经验证,模型在Daimon-Infinity具身数据上进行预训练后,只需约十分之一的数据量,即可在轴孔装配、污痕擦拭、果蔬切削等多项精细操作任务中达到更优的成功率,驱动不同构型机器人完成自主操作任务,训练效率实现10倍的跨越式提升。
外发式数据采集范式
突破空间限制,年产数百万小时数据
传统具身数据依赖封闭式采集工厂,成本高、场景单一、数据多样性不足,难以满足具身智能对真实复杂环境与泛化能力的需求。
为突破这一瓶颈,戴盟构建了全球最大规模的外发式具身数据采集网络。依托轻量化设备与分布式数采体系,采集员可深入真实、多变的应用场景,实现不受空间限制的数据获取,年产数据规模可达数百万小时。基于该网络,Daimon-Infinity已建立全球化数据共建体系,覆盖工业装配、智慧物流、养老护理、家居服务、科研实验、餐饮零售及户外空间等核心场景,实现了跨场景、规模化、低成本的物理交互数据沉淀与可持续供给,构建具身智能的数据基础设施。
开源共建
10000小时最大规模开源数据集
戴盟深知,具身智能的奇点无法由任何一家企业独立跨越,唯有共建才能推动真正的技术跃迁。
Daimon-Infinity部分数据将面向行业共享开放,开源规模达10000小时,包含数百万条真实操作轨迹,覆盖16个行业、80个真实场景超2000项任务类别,涉及超过2000项人类技能、超300种真实物品;其中,时长超过40秒的长序列任务超过1400个,包含如抓放、插入、堆叠等高频手物交互任务。

物品词云图
目前,首批1000小时真实世界数据已上线阿里魔搭社区。戴盟诚邀行业伙伴共建开放的数据生态,共同推动具身智能迈向通用的新阶段。
魔搭链接:
https://modelscope.cn/datasets/daimonrobotics/Daimon-Infinity
关于协会
深圳市机器人协会(SRA)由中国科学院深圳先进技术研究院于2009年9月发起成立,是国内最早成立的机器人行业协会。协会是由深圳市从事机器人行业的企业、研发机构及产业链上下游相关单位自愿组成的非营利性社会组织。深圳市机器人协会伴随着深圳机器人产业的发展和机器人企业的壮大而成长,会员包括工业机器人、服务机器人、医疗机器人、教育机器人、特种机器人及人工智能等领域的企业800余家,会员产值超2000亿元。是机器人领域会员个数和产值规模最大的地方性协会。
协会依托中科院深圳先进院的科研资源,下设深圳市人工智能专家委员会、青年专家委员会和医疗机器人专家委员会,先后发起成立深圳市人工智能学会、华南机器视觉产业联盟和深圳市物流机器人产业联盟。常年为政府、企业和第三方机构提供技术支持、产业对接等咨询服务。
来源|戴盟



